

名古屋工業大学と今仙技術研究所が共同開発
名古屋工業大学の佐野明人教授が10年以上研究・解明してきた「受動歩行」理論に基き、平成23年からモーターもバッテリーも使用しない受動歩行由来の無動力歩行支援機ACSIVE(アクシブ)の共同研究を続けてきました。
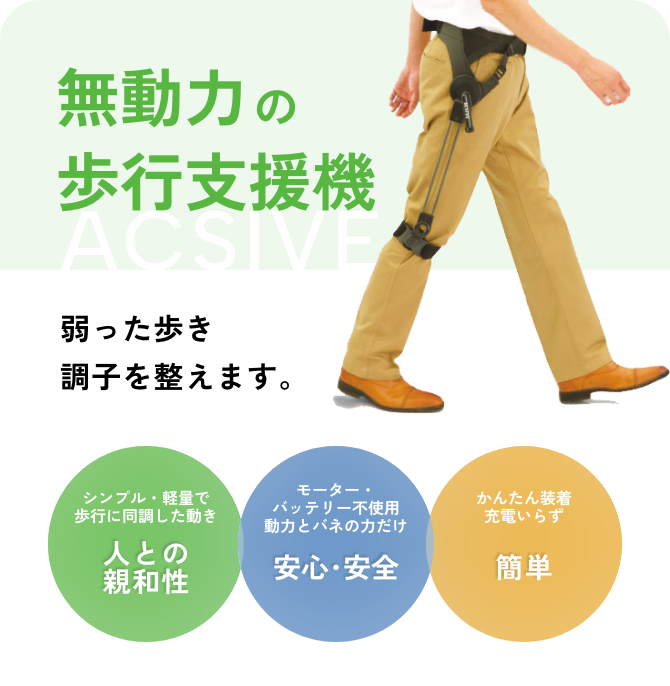
ACSIVE(アクシブ)は脳卒中などで片側が麻痺している、または足が上がりにくい方の歩行支援機として開発されました。
人間の「二足歩行」原理を生かして、モーターやバッテリーを使用せずに、重力とバネの力で歩きが弱った方の歩行イメージを取り戻すことをサポートします。
これまで患者さまにお試し頂き、改良を重ねてきました。今回、発売となる市販モデルは材料にカーボンを一部使用しているため550グラムと軽量で、デザインも大変シンプルです。
ACSIVE(アクシブ)とは、ACTIVE(能動的)とPASSIVE(受動的)の造語で、受動歩行( Passive Walking)由来のロボット技術が人々の生活を下支え、人々を明るく元気に、前向きに活発にするような想いをこめて命名されました。


